Robotik Challenge im Bereich des Leitungssatzes
Die EKS-Lösung für die Robotik Challenge 2026 (Robotik Challenge – Transformations-Hub Leitungssatz) basiert auf einer flexiblen automatisierten Produktionszelle zur robotergestützten Montage des hybriden Leitungssatzmoduls – bestehend aus verschiedenen Einzeladern, einer verdrillten Doppelader, einer Koaxleitung sowie einem Hybridstecksystem.
Die Materialanlieferung erfolgt über zwei Stauförderbänder mit speziellen Bauteilträgern: Ein Förderband liefert die Kabel an, der zweite Stauförderer die Stecker. Pro Leitungssatz wird eine Palette mit Kabeln und eine mit Steckern bereitgestellt. Dabei können drei verschiedene Kabellängen (800mm, 1000mm, 1200mm) verarbeitet werden. Das Ausschleusen der fertigen Baugruppen erfolgt über ein separates Förderband. Die Bestückung der Stauförderer und Entladung der fertigen Teile erfolgt durch einen Werker außerhalb der Zelle. Hier wurden entsprechende Maßnahmen wie Pendelklappen/Eingriffsschutz beim Be- und Entladeprozess berücksichtigt.
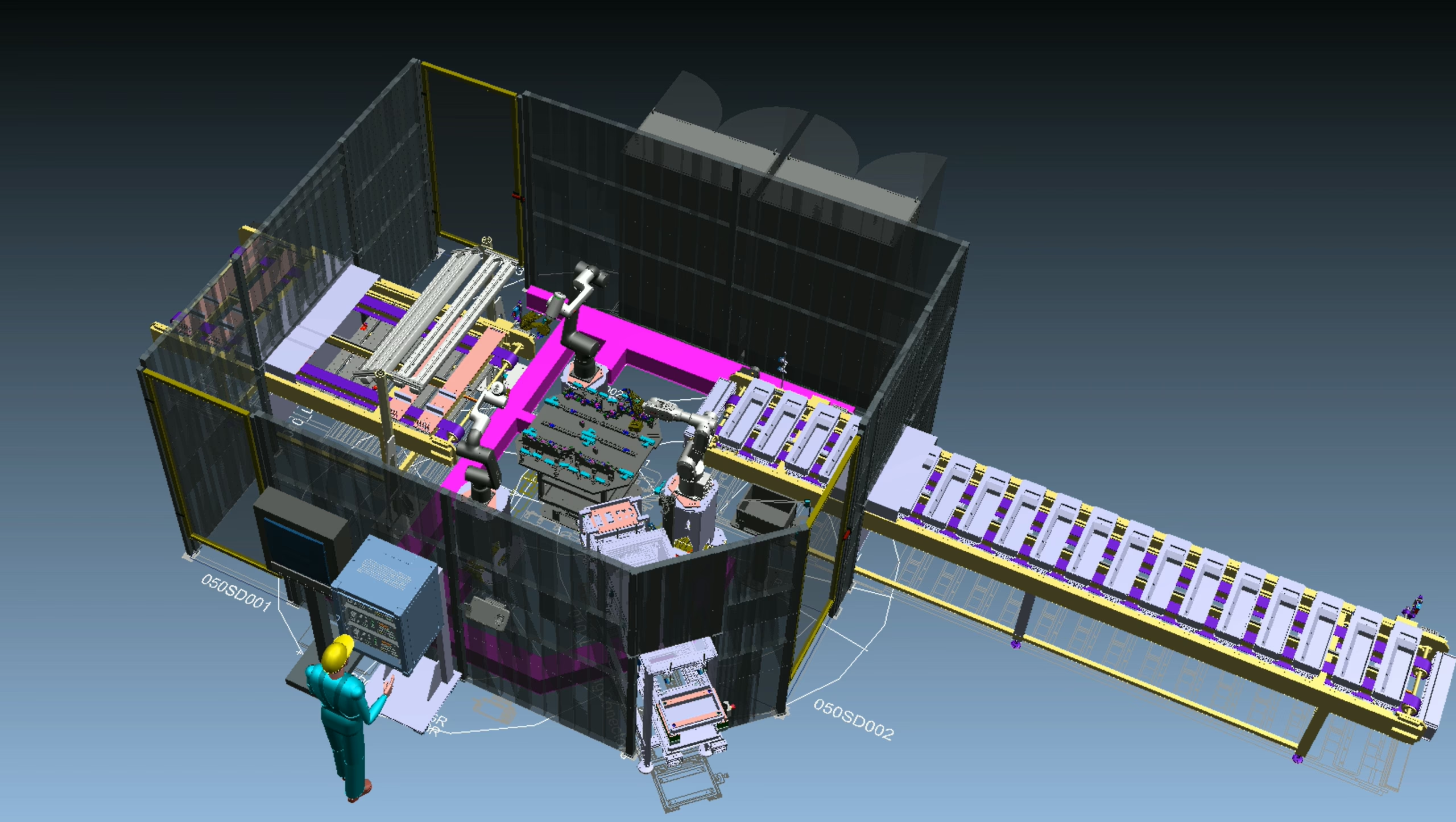
Das Herzstück der Anlage bildet ein Drehtisch, der für eine parallele Montage zur Optimierung der Taktzeit in zwei Hälften aufgeteilt ist. Auf dem Drehtisch befinden sich Formnester, die das präzise Verbinden von Kabel und Stecker ermöglichen. Dabei wird auch die Sekundärverriegelung der Steckverbindung geschlossen. Eine einstellbare Kabelführung sorgt für maximale Flexibilität und ermöglicht die Verarbeitung unterschiedlicher Kabellängen. Fehlerhafte Komponenten werden automatisch in eine NiO-/Ausschleus-Box abgelegt.
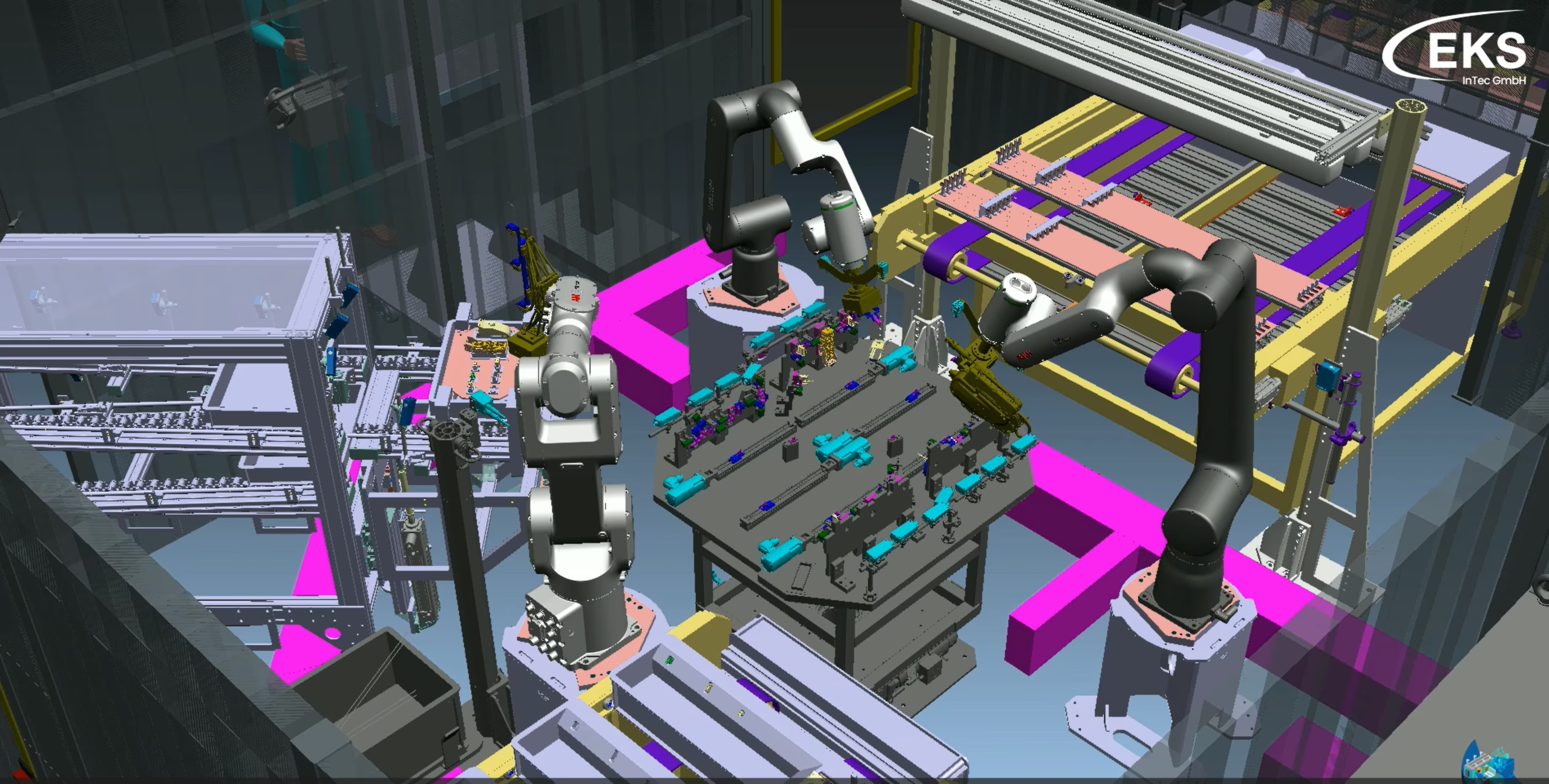
Für den Zusammenbau kommen zwei kollaborierende Roboter zum Einsatz. Ein dritter, konventioneller 6-Achs-Roboter übernimmt die Ausschleusung der Baugruppe. Die Roboter können die Einsteckkraft der Kabel messen. Die Greifsysteme sind mit Kameras ausgestattet, um Kabelenden präzise zu erkennen und zu greifen. Doppelgreifer (Double Tooling) ermöglichen das taktzeit-optimierte Bauteilhandling. Highlight ist hier ein CFK-Freiform-Greifer, der explizit für den Einsatzfall ausgelegt (und mit FEM untermauert) wurde. Zum Setzen der Kabelbinder kommt ein Spezialwerkzeug zum Einsatz.
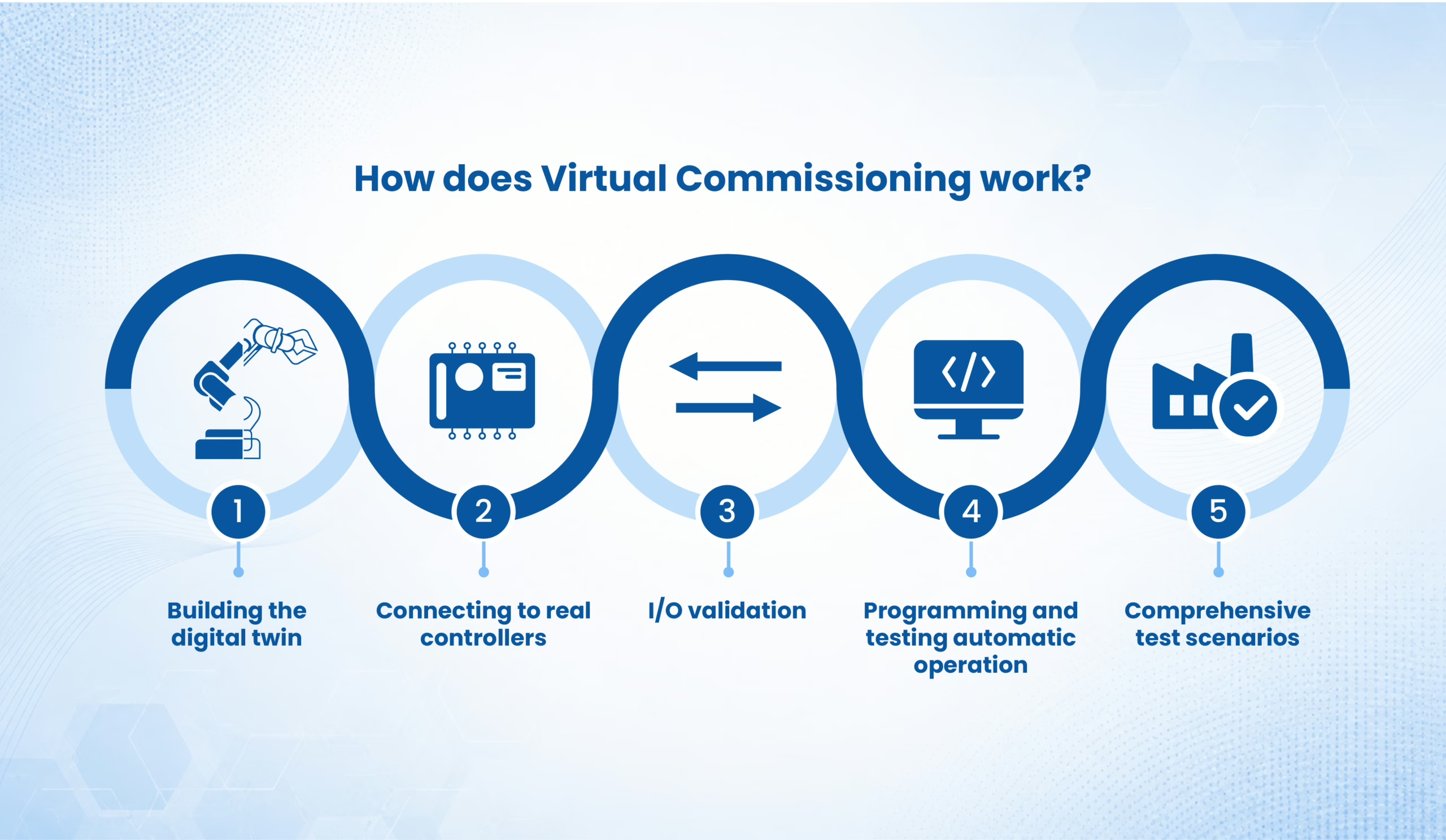
Neben dem Layout, dem Sicherheitskonzept, der Verfügbarkeitsanalyse und der Taktzeitanalyse, wurden die Prozesssimulation (Siemens ProcessSimulate), die Roboter- (ABB RobotStudio) und SPS-Programmierung (RF::ViPer), sowie deren Absicherung durch die Virtuelle Inbetriebnahme mittels RF::SUITE komplett virtuell realisiert. Dabei wurde ein kompletter digitaler Zwilling der Produktionszelle aufgebaut. Hierfür wurde ein detailliertes digitales 3D-Modell aufgebaut, das Roboterprogramme, SPS-Logik, Sensorik, E/A-Kommunikation sowie das Prozessverhalten über Shared-Memory-Kommunikation integriert. RF::ViPer simuliert hier Peripheriegeräte wie Förderbandantriebe, Drehtischmotoren und RFID-Technologie. Kritische Prozesse wie das Bestücken von Steckverbindern, die Handhabung und Positionierung flexibler Kabel, sowie die Synchronisation von Sensoren und digitalen E/A werden dadurch frühzeitig validiert. RF::Recorder zeichnet Prozessdaten auf, die anschließend mit RF::SCOUT zur Analyse von Prozesskontrollpunkten und Fehlerursachen ausgewertet wurden. Mit RF::EDdi wurde die gesamte Umgebung zudem als interaktives Schulungsmodell mit konfigurierbaren Fehlerszenarien für Training und Fehlerbehebung genutzt. Auch ein Export nach NVIDIA Omniverse erfolgte für fotorealistische Multi-User-Simulationen.
Für das durchgängige Datenmanagement wurde RF::CEREB genutzt und ein Konzept für eine AAS-basierte Digitale Montagespezifikation entwickelt, die vorhandene VEC/KBL- und weitere Daten verlinkt.
Die EKS-Lösung kombiniert also einen flexiblen Zellaufbau, moderne kollaborative Robotik und einen durchgängigen digitalen Zwilling. Dadurch können unterschiedliche Kabellängen verarbeitet, Montageprozesse abgesichert, Inbetriebnahmezeiten reduziert und Bediener bereits vor der realen Anlagenverfügbarkeit umfassend geschult werden.
Robotics Challenge in the field of wiring harnesses
The EKS solution for the Robotics Challenge 2026 (Robotics Challenge – Transformation Hub Wiring Harness) is based on a flexible automated production cell for robot-supported assembly of the hybrid wiring harness module – consisting of various single wires, a twisted pair, a coaxial cable, and a hybrid connector system.
Material supply is carried out via two accumulating conveyor belts with special component carriers: one conveyor belt supplies the cables, while the second accumulating conveyor supplies the connectors. For each wiring harness, one pallet with cables and one with connectors is provided. Three different cable lengths (800mm, 1000mm, 1200mm) can be processed. The finished assemblies are discharged via a separate conveyor belt. The loading of the accumulating conveyors and the unloading of the finished parts are carried out by an operator outside the cell. Corresponding measures such as swing flaps/access protection during the loading and unloading process were taken into account.
The heart of the system is a rotary table, which is divided into two halves for parallel assembly in order to optimize cycle time. The rotary table contains form nests that enable the precise connection of cable and connector. The secondary locking mechanism of the plug connection is also closed in the process. An adjustable cable guide ensures maximum flexibility and enables the processing of different cable lengths. Faulty components are automatically placed in a NOK/discharge box.
Two collaborating robots are used for assembly. A third conventional 6-axis robot handles the discharge of the assembly. The robots can measure the insertion force of the cables. The gripping systems are equipped with cameras to precisely detect and grip cable ends. Double grippers (double tooling) enable cycle-time-optimized component handling. A highlight is a CFRP freeform gripper that was explicitly designed for this application and supported by FEM analysis. A special tool is used to set the cable ties.
In addition to the layout, the safety concept, the availability analysis, and the cycle time analysis, the process simulation (Siemens ProcessSimulate), robot programming (ABB RobotStudio), and PLC programming (RF::ViPer), as well as their validation through Virtual Commissioning using RF::SUITE, were completely realized virtually. A complete digital twin of the production cell was created. For this purpose, a detailed digital 3D model was built that integrates robot programs, PLC logic, sensors, I/O communication, and process behavior via shared memory communication. RF::ViPer simulates peripheral devices such as conveyor drives, rotary table motors, and RFID technology. Critical processes such as connector loading, handling and positioning of flexible cables, and synchronization of sensors and digital I/O are validated at an early stage. RF::Recorder records process data, which was then evaluated with RF::SCOUT to analyze process control points and root causes of errors. With RF::EDdi, the entire environment was also used as an interactive training model with configurable fault scenarios for training and troubleshooting. An export to NVIDIA Omniverse was also carried out for photorealistic multi-user simulations.
RF::CEREB was used for end-to-end data management, and a concept for an AAS-based digital assembly specification was developed that links existing VEC/KBL and further data.
The EKS solution therefore combines a flexible cell setup, modern collaborative robotics, and an end-to-end digital twin. As a result, different cable lengths can be processed, assembly processes can be validated, commissioning times can be reduced, and operators can be comprehensively trained before the real system is available.